CS311 CARP Project Report
12110804 方嘉玮
I. Introduction
The CARP problem, which stands for Capacitated Arc Routing Problem, was formally described in 1981 by Golden and Wong[1] in their paper "Capacitated arc routing problems." The problem was motivated by the need to optimize the routing of vehicles in a variety of transportation and distribution systems, such as garbage collection, mail delivery, and street cleaning. In these applications, the objective is to minimize the total distance traveled by the vehicles while ensuring that each vehicle does not exceed its capacity limit.
The CARP problem is NP-hard, which means that it is unlikely to have an efficient algorithm to solve it exactly in all cases. Therefore, researchers have developed various heuristic and metaheuristic approaches to solve the problem approximately. The problem has also been extended to include more complex constraints and objectives, for example multiple depots [2].
In this project, we study the simplified version of CARP.
Purpose of the Project
The purpose of this project is to implement a CARP solver, while getting familiar with the problem and possibly various kinds of solvers proposed in the history.
II. Preliminary
CARP
Definitions
Given an undirected graph
Required Edge: A required edge is defined to be an edge that has a positive demand value.
Route: A route is defined to be an ordered list of required edges, in which each edge
A route defines a path of fixed cost to traverse from the central depot
Task: The formal name for an arc inside a route.
Heads and Tails: Define
Shortest Path between Nodes: Define
Cost of A Route: The total route cost of a route is defined to be
which simply accumulates the cost of each edge traversed.
Total Demand of A Route: The total demand of a route is defined to be:
Solution: A solution is defined to be a set of routes
Cost of A Solution: The cost of a solution is defined to be:
Goal
The goal of CARP is to find a set of routes such that each required edge is served exactly once in a route, and the total cost of routes is minimized.
Formally, the goal is to find a solution such that:
Each required edge is explicitly contained in the solution exactly once.
Other Conventional Notations
III. Methodology
General Workflow
In this project, we implemented a modified version of MAENS [3].
We first generate an initial population. Then, in each iteration we:
Do crossovers on the population, producing an offspring.
Do a local search around the offspring with certain possibility.
Used small-step operator: Single insertion, double insertion and swap.
Used big-step operator: Merge-Split.
After crossover, sort by a stochastic ranking and produce the new population correspondingly.
Detailed Algorithm
We use the memetic algorithm to solve the problem.
Randomly initialize the population
Do
Duplicate the population
as While still need to generate new offspring:
Randomly pick two elements,
, as parents Get the child:
[4] Randomly determine if to do local search around
. If to do local search:
Append
to Sort
by stochastic ranking Pick the first
elements in as the new population. Until timeout
Return the best candidate in
While there are not enough iterations or the quality of the solution hasn't change much from last iteration
While there are not enough iterations or the quality of the solution hasn't change much from last iteration
Return
Single insertion, double insertion and swap are common operations. We emphasize the
In the following procedures,
// p is a parameter of the operator If
, a certain threshold of the operator Do
on all combinations \ by extracting the selected routes and collect the tasks into an unordered list
\ then collect the results
Else
Pick 100 random combinations and do
on these combinations \ by extracting the selected routes and collect the tasks into an unordered list
\ then collect the results
Sort the results by the formula
Return the best solution
among the results
In the procedure
Sort the results by the formula
Return the best solution
among the results
Since
Primary Rule: Satisfy the capacity constraint. If multiple candidates exist, pick the one that is closest to the end of the current path.
Additional Rules
maximize the distance from the head of task to the depot
minimize the distance from the head of task to the depot
maximize the term
minimize the term
use rule 1) if the vehicle is less than half full, otherwise rule 2).
Code can be found at CS311_CARP_Solver/CARP_solver.py at main · IskXCr/CS311_CARP_Solver (github.com). The version submitted on SUSTech Spaces is the wrong one.
Analysis
The optimality of the algorithm is guaranteed by the characteristic of the evaluation function
Deciding Factor of the Performance: The performance of the algorithm relies on certain internal parameters.
| Parameter | Meaning |
|---|---|
| The size of the population | |
| Upper bound for initial trials | |
| Number of offspring produced in each generation | |
| Probability to conduct a local search | |
| Number of routes involved in the | |
| Number of generations involved. In this project there is only time constraint. | |
| Penalty coefficient for evaluating the violation of constraints of a given solution (compared to the current best). |
External parameters of the given input will also determine the performance.
| Parameter | Meaning |
|---|---|
| Number of vertices | |
| Count of tasks | |
| Count of non-task edges | |
| Capacity | |
| Total cost of all tasks |
Besides parameters, the implementation of the
IV. Experiments
Setup
| Name | Specification |
|---|---|
| CPU | i7-1165G7 4C8T @2.80 GHz |
| RAM | 8 Channel LPDDR4 4266MHz |
| Python Version | 3.10.10 (tags/v3.10.10:aad5f6a, Feb 7 2023, 17:20:36) [MSC v.1929 64 bit (AMD64)] |
numpy Version | 1.24.2 |
| Maximum #thread used | 8 |
Dataset [5] and Project CARP_samples
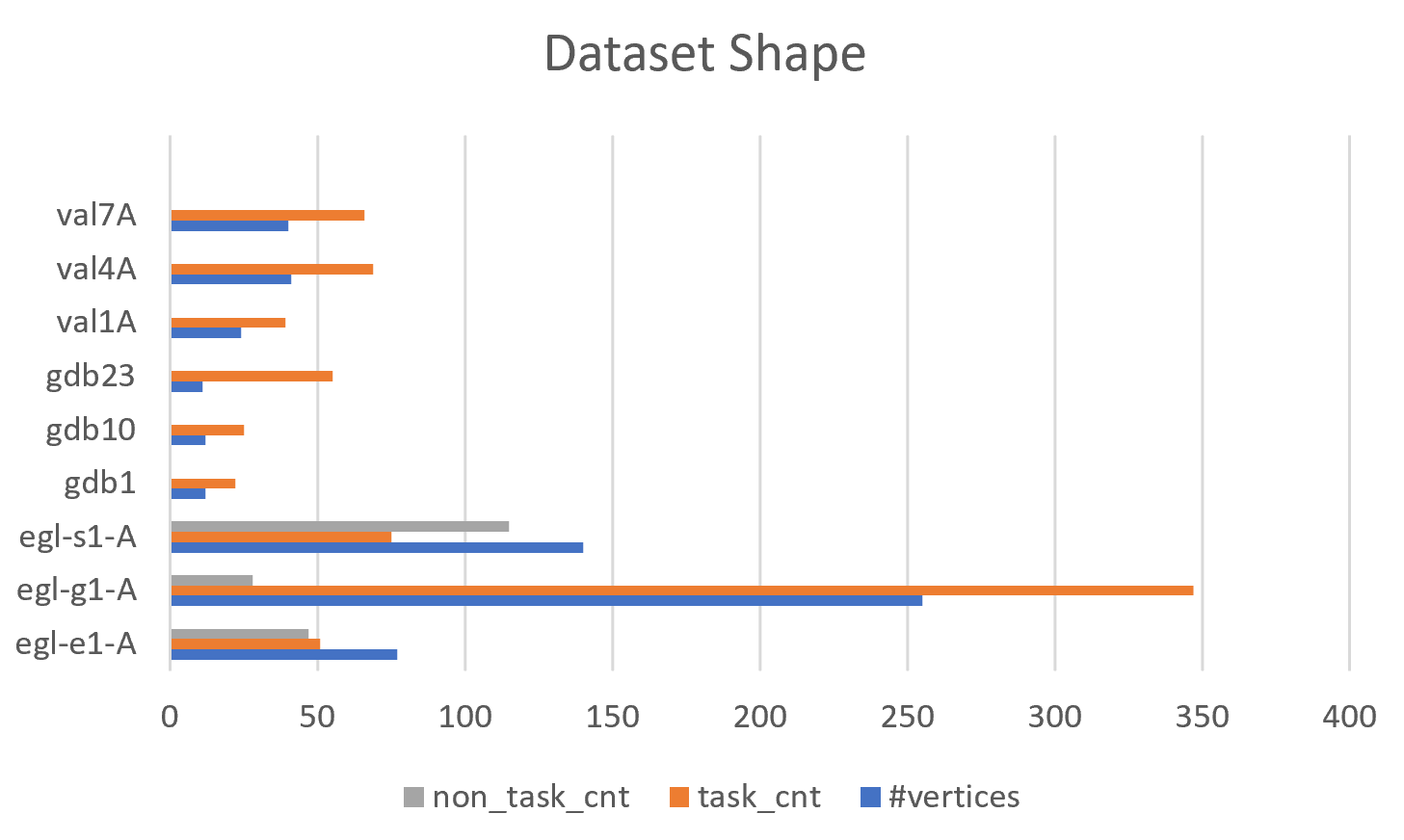
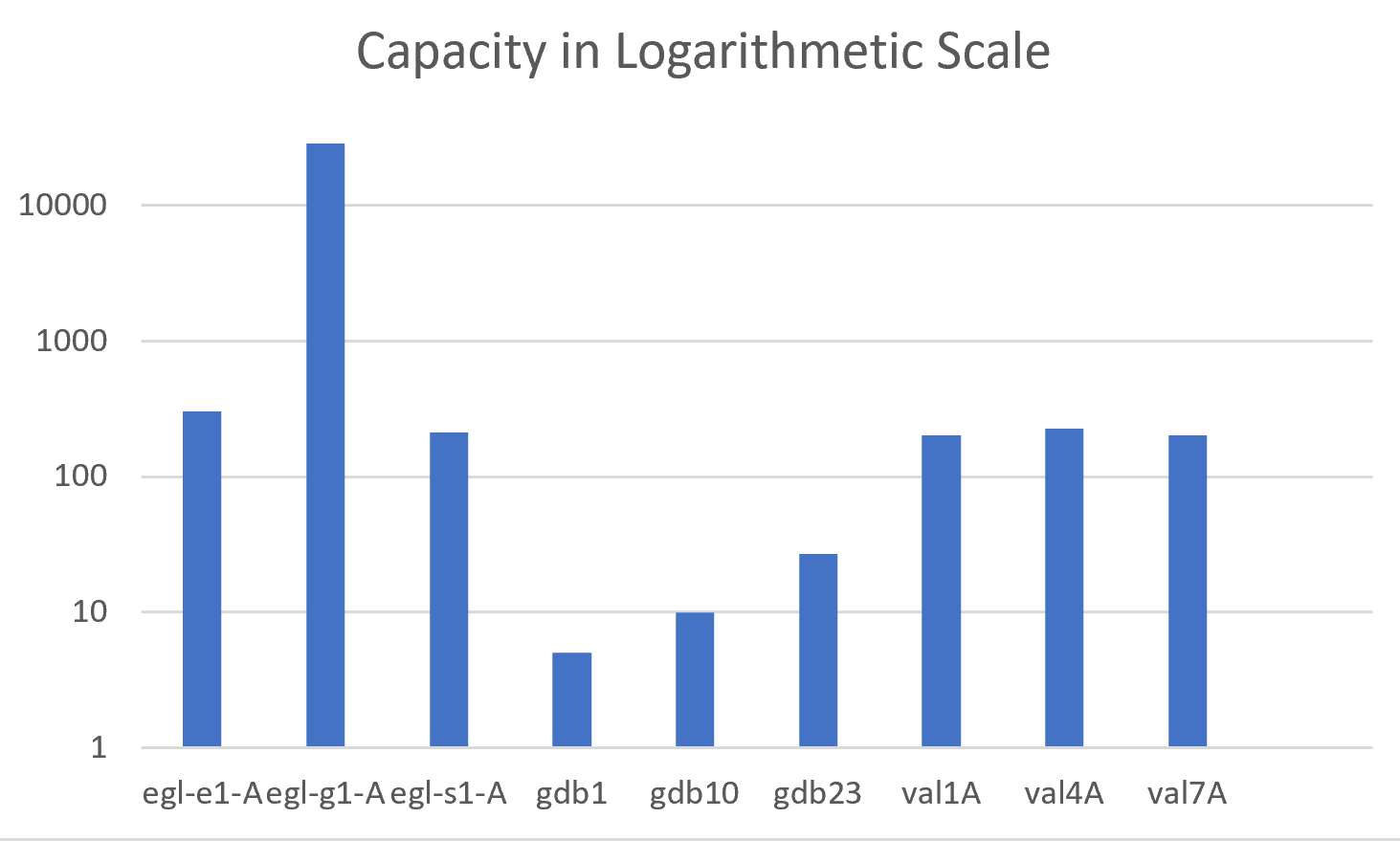
Datasets of different sizes and shapes are gathered for experiment. The shape of a dataset, in this context, is defined to be the relative relations between sizes of non_task_cnt, task_cnt and #vertices of that dataset. The diversity of the dataset contributes to the completeness of the experiment.
Result
seed=2333
The second and the third column contains our result.
| Dataset | 10s Result | 300s Result | Reference MAENS [3] | |
|---|---|---|---|---|
| egl-e1-A | 4151 | 3713 | 3548 | 3548 |
| egl-g1-A | 1513611 | 1349376 | 964014 (MAENS*-IIa) [6] | \ |
| egl-s1-A | 6501 | 5481 | 5018 | 5018 |
| gdb1 | 321 | 316 | 316 | 316 |
| gdb10 | 311 | 283 | 275 | 275 |
| gdb23 | 259 | 238 | 233 | 233 |
| val1A | 183 | 178 | 173 | 173 |
| val4A | 466 | 420 | 400 | 400 |
| val7A | 342 | 298 | 279 | 279 |
Different population size and the result of convergence:
| Dataset | 60s, | 60s, | 60s, |
|---|---|---|---|
| egl-e1-A | 3727 | 3854 | 3959 |
| egl-g1-A | 1419494 | 1385191 | 1366565 |
| egl-s1-A | 5727 | 5930 | 6167 |
| gdb10 | 283 | 277 | 290 |
| val1A | 178 | 178 | 178 |
| val4A | 436 | 436 | 455 |
| val7A | 307 | 321 | 321 |
Analysis
The results of our implementation is acceptable when the size of input is small. As the input enlarges the performance starts to deteriorate. This is expected, as the implementation of the
Enlarging the size of population doesn't necessarily incur a faster convergence in the experiment (given a time limit). Our assumption is that increasing the size of population also decreases the number of iterations in the MAENS algorithm, which in some cases leads to a slower evolution, resulting in generally bad performance. In the other cases with larger input, such modification incurs a larger variance that results in a better local optima being enqueued.
The implementation doesn't use a stochastic ranking but instead rank according to
The implementation is also not well optimized in terms of overall performance, leading to a very slow convergence.
V. Conclusions
Advantages of the algorithm:
Easy to form the initial idea and implement.
Clear design.
Disadvantages:
Heavy tunings on parameters are required to achieve better result.
Implementation of the local search operator determines the quality of local search - poor implementation of the operators leads to much slower convergence.
Hard to design the evaluation function.
Does the experimental result match our expectation?
Yes, as the MS operator is not well designed and lacks tuning. There is also no constraint violation in the offspring produced, which may significantly decrease the algorithm's possibility to jump out of the local optima.
Lessons learned from this project:
Check the version of the file before submission.
Get the framework done in a clean fashion to ease the process of tuning later on.
To implement a fast program in Python requires heavy tuning using potentially
cProfileand other modules to investigate the performance bottleneck.
Further thoughts on how it can be improved:
Optimize the local search operators. Specifically, the
Produce solutions that violates constraints to further improve the versatility of the solution set.
Optimize the evaluation function and try to jump out of the local optima.
References
[1] Golden, B.L. and Wong, R.T. (1981), Capacitated arc routing problems. Networks, 11: 305-315. https://doi.org/10.1002/net.3230110308
[2] A. Kansou and A. Yassine, "A two ant colony approaches for the multi-depot capacitated arc routing problem," 2009 International Conference on Computers & Industrial Engineering, Troyes, France, 2009, pp. 1040-1045, doi: 10.1109/ICCIE.2009.5223923.
[3] K. Tang, Y. Mei and X. Yao, "Memetic Algorithm With Extended Neighborhood Search for Capacitated Arc Routing Problems," in IEEE Transactions on Evolutionary Computation, vol. 13, no. 5, pp. 1151-1166, Oct. 2009, doi: 10.1109/TEVC.2009.2023449.
[4] Yuning Chen, Jin-Kao Hao, Fred Glover, A hybrid metaheuristic approach for the capacitated arc routing problem, European Journal of Operational Research, Volume 253, Issue 1, 2016, Pages 25-39, ISSN 0377-2217, https://doi.org/10.1016/j.ejor.2016.02.015.
[5] Capacitated Arc Routing Problem (uv.es)
[6] Consoli, Pietro & Minku, Leandro. (2014). Dynamic Selection of Evolutionary Algorithm Operators Based on Online Learning and Fitness Landscape Metrics. Soft Computing. 20. 359-370. 10.1007/978-3-319-13563-2_31.